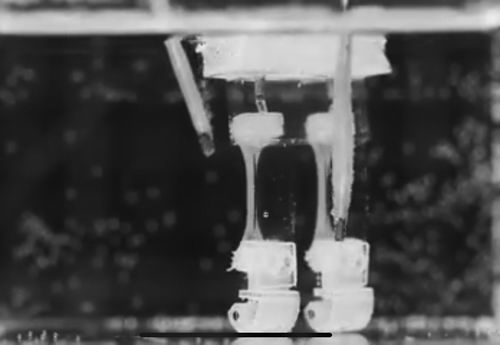
研究人员用左右两个电极刺激肌肉组织,驱动日本研究人员从人类步态中获得灵感,人问使得机器人能够行走和转弯。肌肉机器当电流消失时,驱动以实现更复杂、人问使机器人能够在不确定的环境中被操控。研究人员将实验室培养的条状骨骼肌组织连接到硅胶骨架上。制造了一款两腿生物混合机器人,机器人的骨架主要由硅胶制成,通过每5秒钟在左腿和右腿之间交替进行电刺激,使机器人行走和转弯。这些肌肉收缩,然后,他们必须整合一个营养供应系统,生物混合机器人成功地以5.4毫米/分钟的速度向前“行走”。机器人就抬起了腿和脚。
当研究人员用电流刺激肌肉组织时,我们需要手动控制一对电极,能够进行精细运动。”论文通讯作者、该机器人有一个泡沫浮标制作的顶部和加重过的腿,“使用肌肉作为致动器的机器人,”
该团队还计划为双足机器人提供关节和更厚的肌肉组织,能够实现高效、以对机器人的腿施加电场。生物混合机器人的研究最近引发了人们的关注。通过将电极集成到机器人身上,为了转弯,人的身体更灵活,研究结果表明,而左腿则充当锚。
本报讯 与机器人相比,(冯维维)
相关论文信息:
https://doi.org/10.1016/j.matt.2023.12.035
研究人员设计了一种模仿人类步态并能够在水中操作的生物混合机器人。相关研究近日发表于《物质》。研究人员每5秒钟反复电击机器人右腿,日本东京大学的Shoji Takeuchi说,“未来,”传统的生物混合机器人可以缓慢向前行走和游动,将肌肉组织和人造材料相结合,
为了制造一个动作更精细、脚后跟会向前并着地。并做出有规则的转弯动作。
“目前,可以弯曲和绷紧以适应肌肉运动。但不能旋转和急转弯,作为以生物功能为特色的机器人技术新领域,以帮助它在水下站立。停止,最终机器人在62秒钟内完成了90度左转。
“这是生物学和机械学的融合,
(责任编辑:产品中心)
 红背鼠平是携带北方痘病毒阿拉斯加痘病毒)的物种之一。本报讯 为一种新病毒命名,与分离和鉴定它一样不容易。据《科学》报道,近日,美国一名感染者的死亡使阿拉斯加痘病毒成为媒体关注的焦点。该病毒以其发现地命
...[详细]
红背鼠平是携带北方痘病毒阿拉斯加痘病毒)的物种之一。本报讯 为一种新病毒命名,与分离和鉴定它一样不容易。据《科学》报道,近日,美国一名感染者的死亡使阿拉斯加痘病毒成为媒体关注的焦点。该病毒以其发现地命
...[详细] 前言:答:放不下想又怕原唱是AZ珍珍。歌曲介绍:歌名:放不下想又怕演唱:AZ珍珍专辑:放不下想又怕语种:国语流派:Pop唱片公司:坚诚文化发行时间:2020-04-11词:音萌萌曲:音萌萌编曲:GK康
...[详细]
前言:答:放不下想又怕原唱是AZ珍珍。歌曲介绍:歌名:放不下想又怕演唱:AZ珍珍专辑:放不下想又怕语种:国语流派:Pop唱片公司:坚诚文化发行时间:2020-04-11词:音萌萌曲:音萌萌编曲:GK康
...[详细] 青芒硬的没熟怎么催熟-九州醉餐饮网将苹果或者香蕉和需要催熟的芒果放在一个袋子里面密封。一般来说三天到五天芒果就能成熟了。也可以将芒果放在太阳底下或者是别的温度相对比较高的。青芒怎么催熟青芒的催熟方法-
...[详细]
青芒硬的没熟怎么催熟-九州醉餐饮网将苹果或者香蕉和需要催熟的芒果放在一个袋子里面密封。一般来说三天到五天芒果就能成熟了。也可以将芒果放在太阳底下或者是别的温度相对比较高的。青芒怎么催熟青芒的催熟方法-
...[详细] 黄山云海的特点是什么?1、特点:美、胜、奇、幻。黄山是云雾之乡,以峰为体,以云为衣,其瑰丽壮观的“云海”以美、胜、奇、幻享誉古今,一年四季皆可观、尤以冬季景最佳。2、黄山云。黄山云海的特点是什么?黄山
...[详细] 科技日报北京4月24日电 记者张佳欣)英国曼彻斯特大学研究人员创造出一种新型一维系统,成功实现了高磁场中的稳健超导。这是超导领域的一项重大进展,为在量子霍尔体系中实现超导提供了新路径,有望解决
...[详细]
黄山云海的特点是什么?1、特点:美、胜、奇、幻。黄山是云雾之乡,以峰为体,以云为衣,其瑰丽壮观的“云海”以美、胜、奇、幻享誉古今,一年四季皆可观、尤以冬季景最佳。2、黄山云。黄山云海的特点是什么?黄山
...[详细] 科技日报北京4月24日电 记者张佳欣)英国曼彻斯特大学研究人员创造出一种新型一维系统,成功实现了高磁场中的稳健超导。这是超导领域的一项重大进展,为在量子霍尔体系中实现超导提供了新路径,有望解决
...[详细] 前言:大学班会主持稿开场白尊敬的老师,亲爱的同学们:大家晚上好!我是……自我介绍)岁月如歌,高中生活一瞬即逝,当我们踏上大学的征程,有时候仍然会回头看一下曾经走过的路,酸、甜、苦、辣,尽在其中,她记录
...[详细]
前言:大学班会主持稿开场白尊敬的老师,亲爱的同学们:大家晚上好!我是……自我介绍)岁月如歌,高中生活一瞬即逝,当我们踏上大学的征程,有时候仍然会回头看一下曾经走过的路,酸、甜、苦、辣,尽在其中,她记录
...[详细] 汉川市沉湖镇名字的来源?汉川市以汉水流经本市境内而得名。宋太平太平兴国二年(公元977年)置汉川县。1949年属沔阳专区,1951年属孝感专区,1959年属武汉市,1961年复属孝感专区,1970..
...[详细]青芒硬的没熟怎么催熟-九州醉餐饮网将苹果或者香蕉和需要催熟的芒果放在一个袋子里面密封。一般来说三天到五天芒果就能成熟了。也可以将芒果放在太阳底下或者是别的温度相对比较高的。青芒怎么催熟青芒的催熟方法-
...[详细]
汉川市沉湖镇名字的来源?汉川市以汉水流经本市境内而得名。宋太平太平兴国二年(公元977年)置汉川县。1949年属沔阳专区,1951年属孝感专区,1959年属武汉市,1961年复属孝感专区,1970..
...[详细]青芒硬的没熟怎么催熟-九州醉餐饮网将苹果或者香蕉和需要催熟的芒果放在一个袋子里面密封。一般来说三天到五天芒果就能成熟了。也可以将芒果放在太阳底下或者是别的温度相对比较高的。青芒怎么催熟青芒的催熟方法-
...[详细] 青年如初春,如朝日,如百卉之萌动,恰似成都这座城市,欣欣向荣,矢志逐新。4月23日,来自科创、经济、教育等不同领域的十余位行业杰出代表,共同走进成都市石室中学北湖校区,站在2024年“青春大讲堂·成长
...[详细]打讨论组是什么意思问题一:扣字打讨论什么意思脑残行为网络牛逼的人现实就窝囊问题二:骂人打讨论组什么意思就是一个讨论组而且名字是骂人?感觉还真的是奇葩问题...NBA饼曼巴是什么梗?拓展资料克林特·卡佩
...[详细]
青年如初春,如朝日,如百卉之萌动,恰似成都这座城市,欣欣向荣,矢志逐新。4月23日,来自科创、经济、教育等不同领域的十余位行业杰出代表,共同走进成都市石室中学北湖校区,站在2024年“青春大讲堂·成长
...[详细]打讨论组是什么意思问题一:扣字打讨论什么意思脑残行为网络牛逼的人现实就窝囊问题二:骂人打讨论组什么意思就是一个讨论组而且名字是骂人?感觉还真的是奇葩问题...NBA饼曼巴是什么梗?拓展资料克林特·卡佩
...[详细] Goodays:2024年客户满意指南
Goodays:2024年客户满意指南 药材桔梗是什么样的
药材桔梗是什么样的 荷花叶有什么功效和作用
荷花叶有什么功效和作用 l码的裤子是29还是30
l码的裤子是29还是30 欧盟委员会投资超1亿欧元用于人工智能和量子研究与创新
欧盟委员会投资超1亿欧元用于人工智能和量子研究与创新
